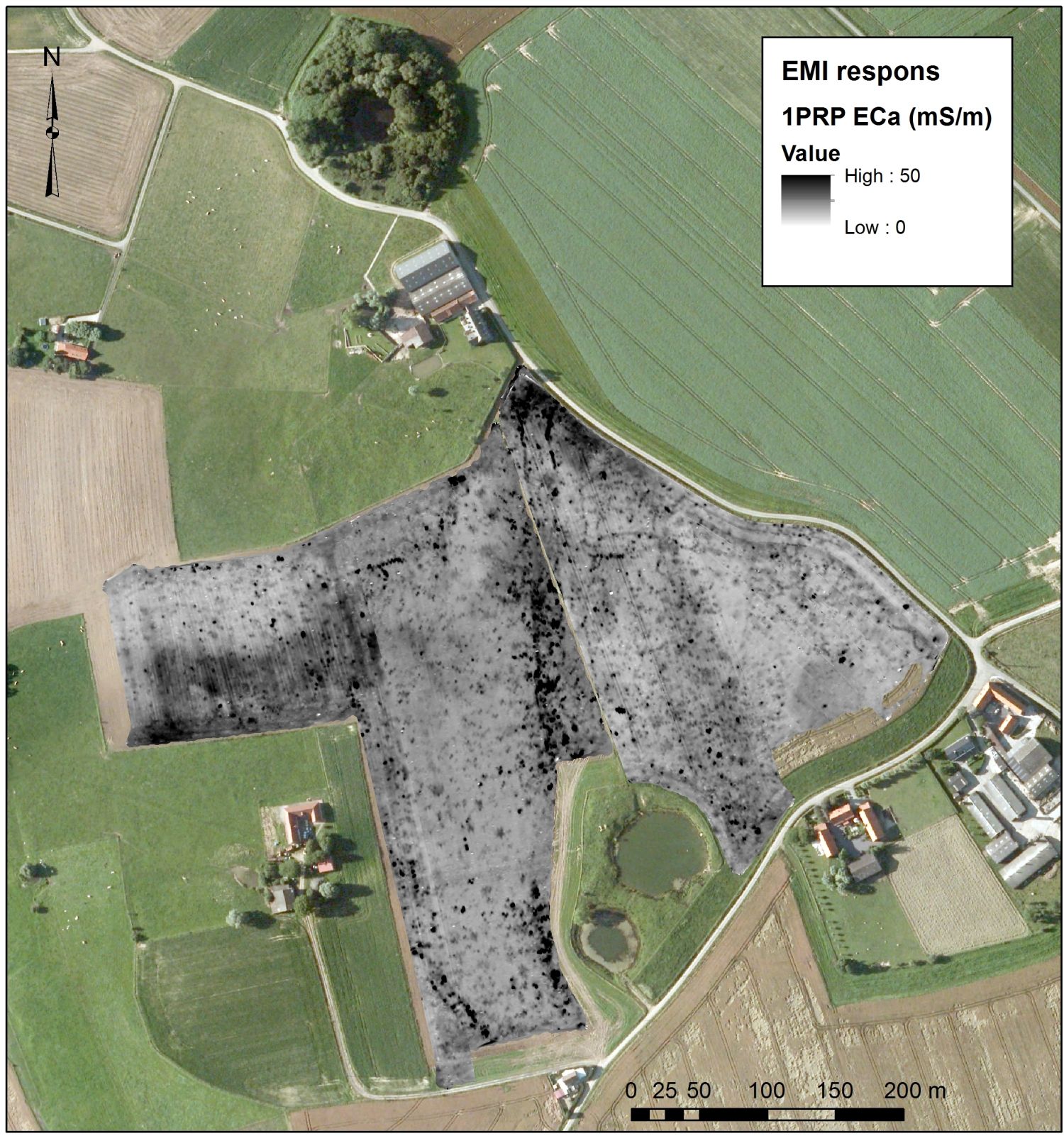
De bodem verkennen en karakteriseren zonder te graven vormt de kern van geofysische prospectie. Hierbij wordt een sensor ingezet die ofwel actief of passief de veranderingen van een bepaalde bodemeigenschap in kaart brengt. Door het gebruik van een nauwkeurige GPS-plaatsbepaling (RTK) kunnen deze metingen gelokaliseerd worden. Interpolatie van deze data zorgt dan voor een beeld waarbij afwijkingen en variatie van het gekarteerde kenmerk worden gevisualiseerd. In het onderzoeksproject ‘Niet-invasieve landschapsarcheologie van de Groote Oorlog’ worden drie types sensoren gebruikt om WO1-archeologische sporen (=bodemverstoringen) in kaart te brengen. In de eerste plaats wordt elektromagnetische inductie (EMI) ingezet als verkennende prospectietechniek om de geselecteerde locaties in het studiegebied volledig in kaart te brengen. Daar waar interessante magnetische sporen gevonden worden kan er met een groter detail door middel van magnetometrie een kartering worden uitgevoerd op deze anomalieën. Indien nodig en wanneer de bodemcondities dit toelaten, kan door middel van grondradar in hoge planimetrische resolutie een kartering en een diepte-inschatting gemaakt worden van de archeologische sporen.
Electromagnetische Inductie
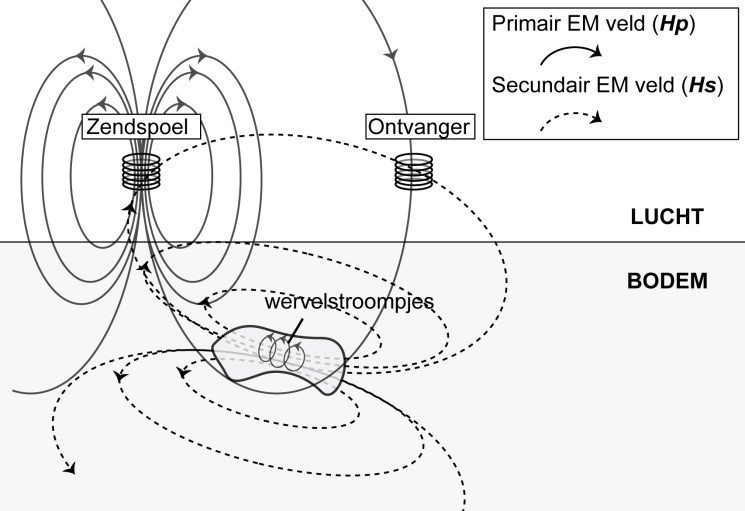
Deze geofysische prospectietechniek is gebaseerd op de respons van de bodem op elektromagnetische golven. Bij elektromagnetische inductie wordt in een zendspoel een magnetisch veld opgewekt (het primaire magnetische veld (Hp) waardoor in de bodem elektrische stroompjes ontstaan die op hun beurt een eigen magnetische veld opwekken (Hs). Dit opgewekte (geïnduceerde) veld is in uit-fase met het primaire magnetische veld.
Een fractie van zowel het primaire magnetische veld als het geïnduceerde, of secundaire, veld wordt vervolgens opgevangen door een ontvangstspoel waarna het signaal versterkt en uitgedrukt wordt in output-voltage. Dit voltage staat in lineair verband tot de elektrische conductiviteit (EC) van de bodem. Het primaire magnetische veld werkt ook in op de magnetische kenmerken van de bodem. Dit laat toe om de magnetische gevoeligheid of susceptibiliteit (MS) op te meten als de in-fase respons. Eenvoudig gesteld geeft deze magnetische susceptibiliteit weer in welke mate een materiaal kan worden aangetrokken door een magneet. De meting van de bodem is een integratie van deze parameters over een bodemvolume onder het instrument, bijgevolg worden de waarden uitgedrukt in ‘schijnbare’ EC (ECa) en MS (MSa).
Instrumentarium
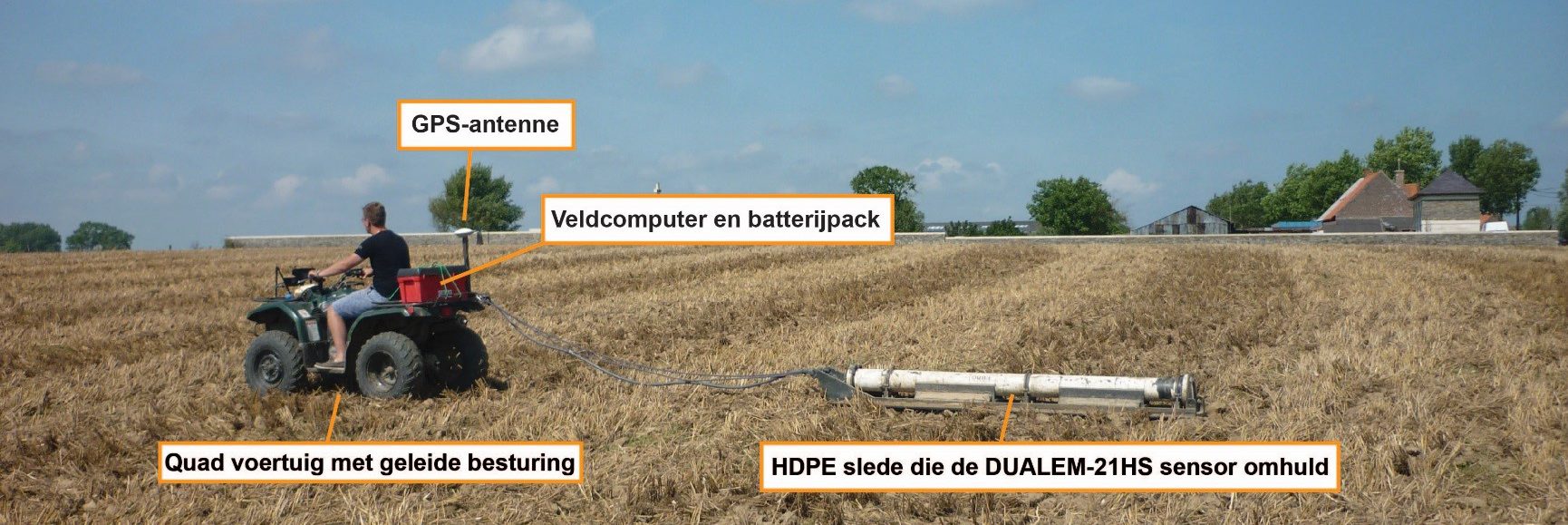
Metingen worden uitgevoerd met een meerspoelige elektromagnetische inductiesensor. Meer specifiek wordt geopteerd voor een DUALEM-21HS of een DUALEM-421S. Deze sensoren maken het mogelijk om gelijktijdig EC en MS op te meten in zes ontvangstspoelen die zich op een verschillende afstand van de zendspoel bevinden. De ontvangstspoelen hebben daarnaast een wisselende oriëntatie (horizontaal (HCP) of loodrecht (PRP)) ten opzichte van het bodemoppervlak. Er zijn dus twee spoeloriëntaties op zes verschillende spoelafstanden voor beide sensoren. Door deze configuratie worden zes EC en zes MS-signalen met een verschillende dieptegevoeligheid gelijktijdig gemeten.
De dieptegevoeligheid van de spoelconfiguraties wordt standaard gezien als de diepte waarbij 70% van het totale gemeten signaal afkomstig is van het bodemvolume boven deze diepte. Eenvoudig gesteld wordt zo informatie verzameld over de elektrische en magnetische karakteristieken van zowel oppervlakkige als diepere bodemlagen tot op een diepte van ongeveer 3 m (DUALEM-21HS) of 6 m (DUALEM-421S).
Meetconfiguratie
De sensor wordt in een langwerpige slede in één lijn achter een quad gesleept tegen een gemiddelde snelheid tussen de 6 en 10 km/u. Een cm-nauwkeurige GPS wordt gehanteerd om de metingen te georefereren. In combinatie met een navigatiesysteem word het mogelijk gemaakt om op rechte lijnen te rijden met een vaste tussenafstand. Een af te scannen zone wordt op deze manier opgemeten in parallelle rijlijnen die voor archeologie tussen de 0.70 (fijn) tot 1.40 m (grof) uit elkaar liggen. Aan een meetfrequentie van 8 Hz worden hierbij per seconde acht ECa en acht MSa metingen per spoelconfiguratie samen met één GPS-meting digitaal opgeslagen in een veldcomputer. Hierdoor ligt het staalname-interval per spoel op ongeveer 0.25 m in de meetlijn.
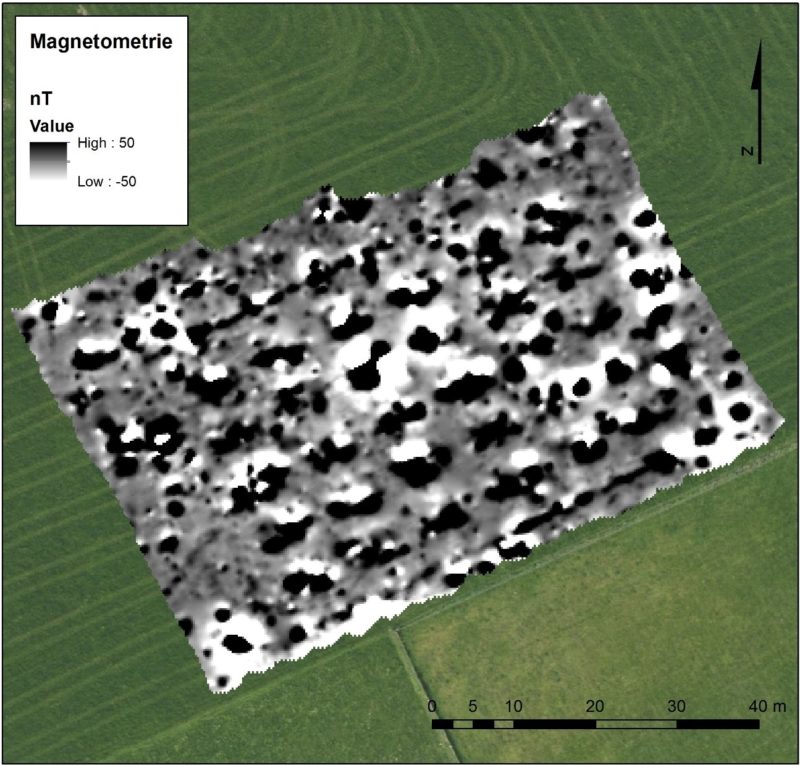
Magnetometrie
Magnetometrie is een passieve geofysische prospectietechniek die toelaat om heel nauwkeurig subtiele afwijkingen van het aardmagnetisch veld op te sporen. Zulke afwijken worden veroorzaakt door objecten of bodemverstoringen met een andere magnetische susceptibiliteit dan de omgevende bodemmatrix. Onze fluxgate sensoren in gradiometeropstelling laten toe de verticale component van het magnetisch veld op te meten en dit met een meetbereik van ongeveer 3 m diep.
Meetconfiguratie
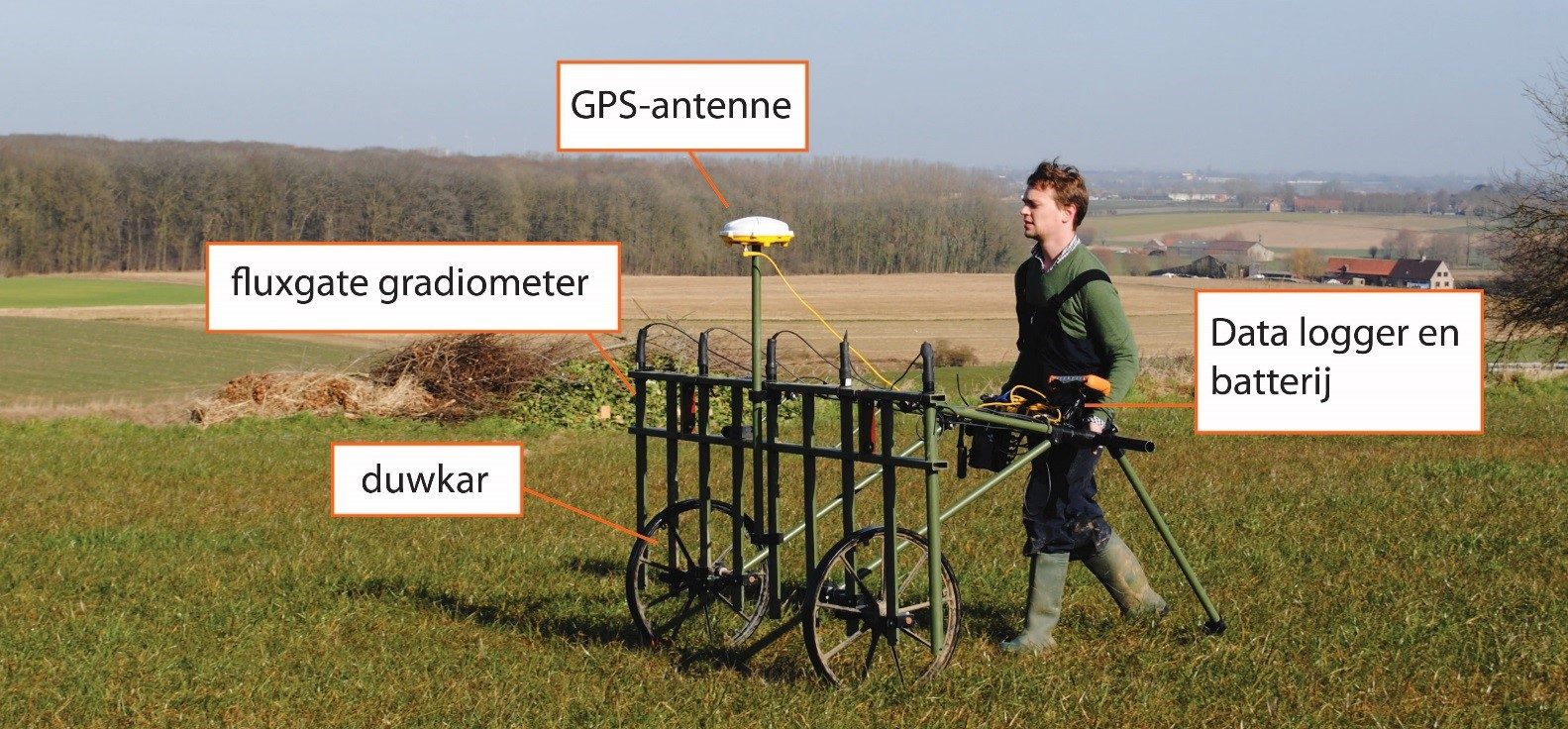
Magnetometrie word uitgevoerd in een array opstelling van 5 fluxgate gradiometers die meestal op 0.5 m afstand van elkaar worden geplaatst. De metingen worden voornamelijk manueel (zonder quad) uitgevoerd vanwege de gevoeligheid aan directionele invloeden. De metingen worden gekoppeld aan coördinaten die geregistreerd worden door een cm-nauwkeurige GPS.
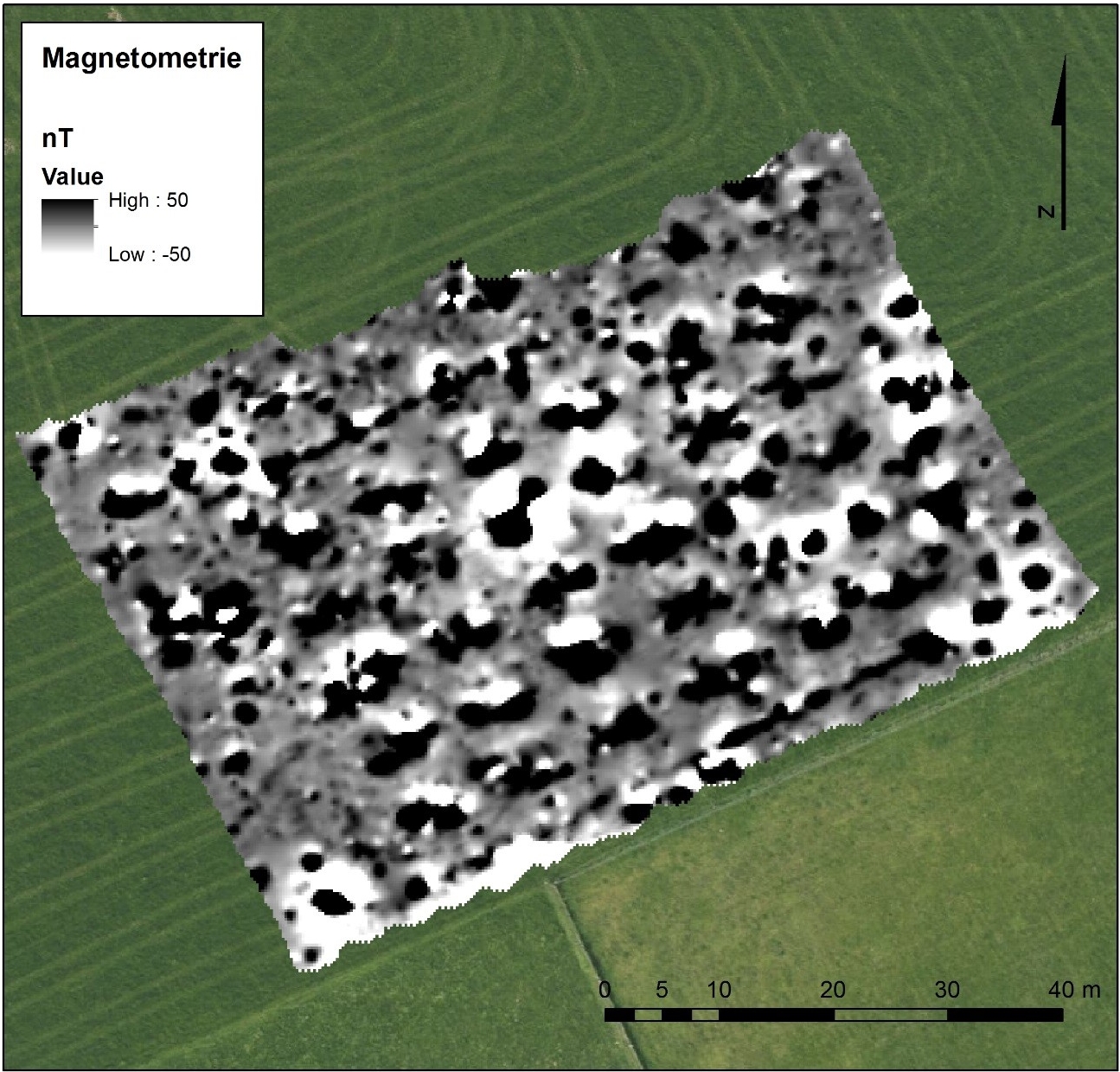
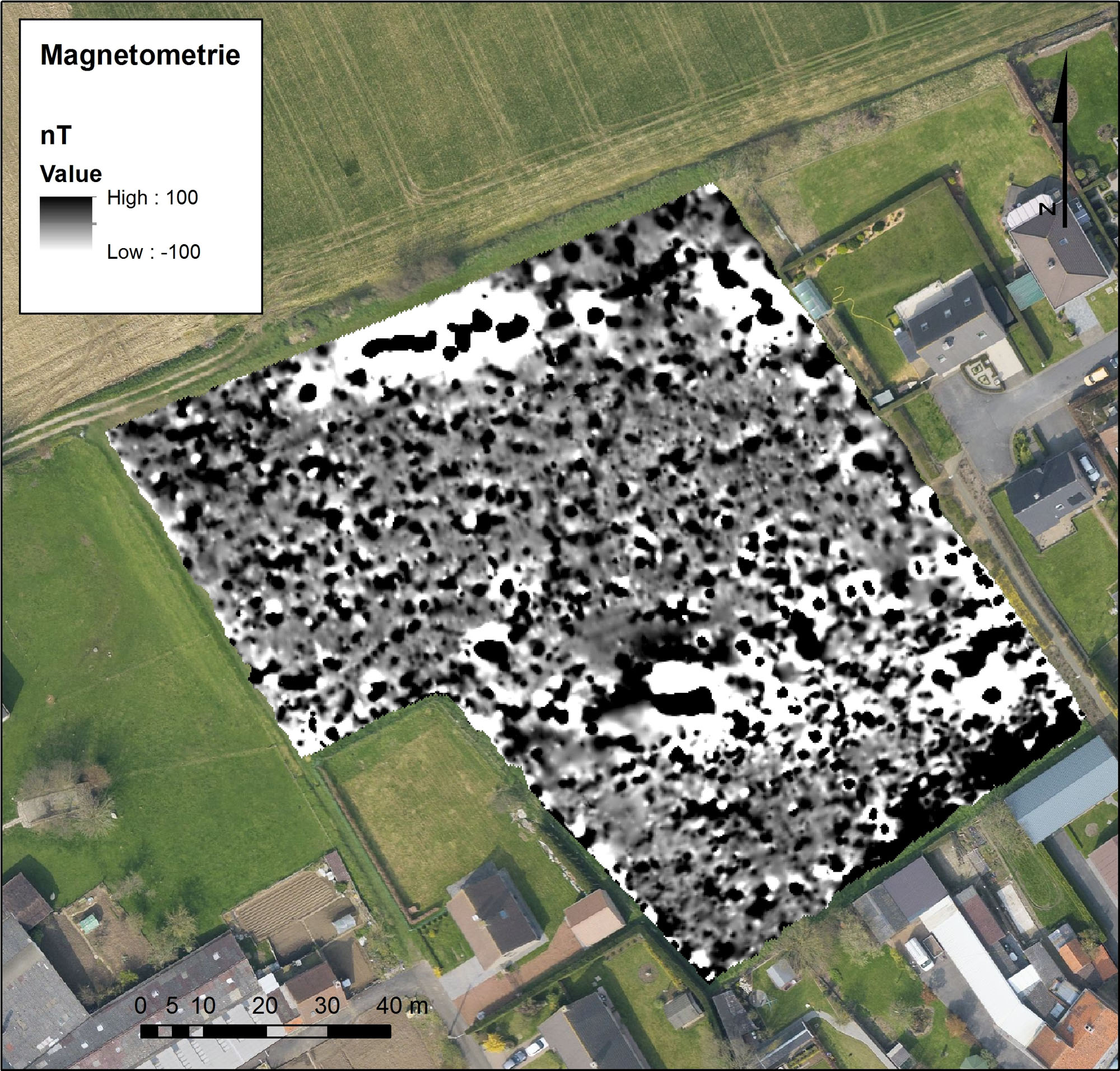
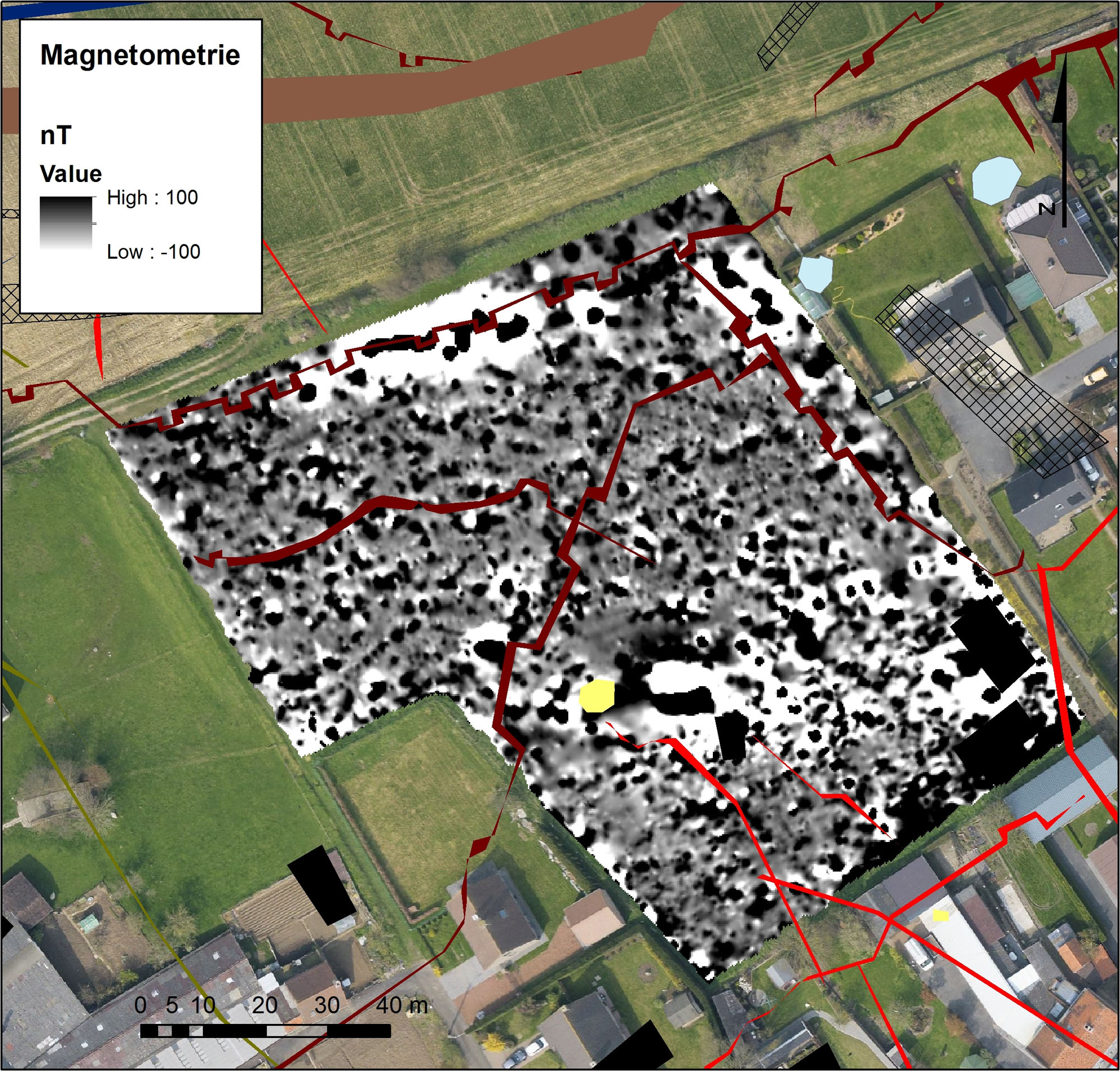
Kies tussen het linkse en rechtse beeld door met de muis de lijn centraal in het beeld te verplaatsen. Gebruik Mozilla Firefox of Google Chrome voor een goede weergave. Hier in beeld: toepassing van magnetometrie op een weiland in het centrum van Wijtschate.
Grondradar (GPR)
Grondradar of GPR‐survey is een actieve prospectietechniek waarbij elektromagnetische golven de bodem worden ingestuurd met een zendantenne, waarna de reflecties en refracties van deze golven vervolgens worden opgevangen met ontvangstantennes. Het achterliggende principe is dat van een tijdsmeting tussen het uitzenden van een radiogolf met een bepaalde frequentie en het ontvangen van zijn reflectie. Uit deze dubbele tijdsmeting kan de diepte van het reflecterend voorwerp bepaald worden. Het fysisch kenmerk dat voor een reflectie zorgt is het contrast in diëlektrische permittiviteit tussen de bodem en het begraven object, verstoring of holte. Hoe hoger dit kenmerk hoe trager de golf voortbeweegt, in lucht is deze snelheid het hoogst, in water het laagst (zo’n 9x trager dan in lucht). De resolutie en de dieptepenetratie van de GPR-metingen hangen af van de frequentie van de uitgestuurde golven. Hoe hoger de frequentie, hoe fijner de meetresolutie. Maar dit gaat ten koste van het dieptebereik, dat vergroot naarmate lagere frequenties worden gebruikt. Een scan met een grondradar laat dus toe om indicaties te bekomen van de positie (in ruimte en diepte) van contrasterend of afwijkend materiaal (grondlagen met afwijkende diëlektrische eigenschappen, (natuur)steen in bodemmatrix, …).

Meetconfiguratie
Het GPR-systeem dat wordt ingezet voor dit onderzoek is van het type 3D‐radar Geoscope met bijhorende antenne‐array dat in een gemotoriseerde mobiele opstelling wordt gebruikt. De array combineert 13 verschillende antennekoppels waardoor een heel fijne meetresolutie wordt gehaald (7.5 cm tussen meetlijnen). Er wordt gebruik gemaakt van een frequentiebereik van 200 tot 3000 MHz. Alle metingen worden gegeorefereerd met behulp van een RTK GPS‐systeem.